The beginning of this ice season has been anything but consistent. We’ve had thigh deep snow topping out of Huntington Ravine in October followed up by spring-like temperatures on the high summits for weeks with only splashes of short cold spells here and there. Usually I can get a sense of what the ice conditions will be like, but this year I’ve been off my game. Two weekends ago, I stopped thinking about ice and went for a three day backpack in the Wild River Wilderness. Just this past weekend, I thought there wouldn’t be much to climb out there, so I donned my summer trail running shoes and headed up and around the side of Mt. Jefferson with some friends.
I found out that evening, when my phone buzzed with picture messages, that I was dead wrong. While I was in and over the clouds that day, there was a duo climbing what was likely the longest and fattest ice line in northeast as of that moment. That was Hillman’s Highway in Tuckerman Ravine, and yes, there was a lot of ice. At least the beautiful undercast was worth missing out on the climbing action.
Hillmans Highway (11.28.15) Photos courtesy of Nick Yardley
Others tackled Tuckerman Headwall on the day, the day before and the one after. Despite it getting sun baked, the ice seemed to hang in there just enough. Huntington Ravine also saw some action, with Odells Gully, not surprisingly, seeing the most traffic. Check out the condition reports for information on those climbs.
Elsewhere in New Hampshire, Alden Pellett explored the Big Slide area up Mt. Lafayette on last Sunday to find a thin runnel of ice from bottom to top.
Taylor Luneau on the Big Slide. (11.29.15)
Vermont
Center Tablets (11.29.15)
Up in Lake Willoughby, things are admittedly looking a little sad. This picture of the Center Tablets about sums it up.
Smuggler’s Notch has been like a bad relationship: on, off, on and then off again. Like some mystical land, the routes appear and disappear in mere hours and at random times.
Reports from last Saturday in the notch confirmed there was a lot of moving water and some verglass on the rocks in the gullies but the ground wasn’t frozen yet. Jeff’s Slide appeared as a thin apparition and then disappeared again this week with the warm temperatures. But there’s hope! The road officially closed and I’m sure climbers will be heading in this coming weekend to see what’s there.
Gully left of blue ice bulge, above & right of Terrortory, just the day before. (11.27.15)
Jeff’s Slide before it disappeared again. (11.28.15) Photo by Tim Farr
New York
News has been quiet in the Adirondacks, but I’m sure that doesn’t mean the locals haven’t been climbing. The last bird I saw told me Chouinard’s Gully was climbed in super thin conditions, but that was days ago and the way this season has been going, that fact becomes totally irrelevant.
So what now? What’s going to happen this weekend? What the f&@k is going on with this weather? It’s anyone’s guess, but the forecast calls for a high of 40 degrees on the summit of Mt. Washington Saturday. Go figure that it’s snowing and cold up there as I write this article.
What’s been going on in your neck of the woods? Find some good ice? Let me know at courtney@neice.com! Till then, good luck out there!
I’ll leave you with these videos, as they sum it up best. Some great footage of the changes in Tuckerman Ravine, courtesy of NEice Community member, Matt Bowman! Thanks for sharing these.
Special thanks to Nick Yardley, Alden Pellett, Tim Farr and Matt Bowman.
https://www.neice.com/wp-content/uploads/2015/12/WTF-Smuggs.jpg481600NEice Adminhttps://www.neice.com/wp-content/uploads/2016/10/2012_NEice_logo_oval_blk6-300x103.pngNEice Admin2015-12-04 13:50:512015-12-04 13:50:51December UPdate – What the f&@k?
THE KRONOS, THE WORLD’S FIRST ‘T’ RATED TECHNICAL ICE CLIMBING TOOL MADE OF WOOD
“Just amazing, a ‘T’ RATED wood ice tool. The future is here!” – Doug Millen
Fellow Ice Climbers,
We are extremely proud to finally release the KRONOS Wood Ice Tool. You can get yours HERE.
The KRONOS is the World’s First ‘T’ Rated. CE Certified Ice Tool made of WOOD. T ratings and CE Certifications are the standard among technical ice axes which must be able to withstand extreme forces and abuse. To have been able to make an ice tool out of wood that passes the T test is truly a unique accomplishment and we are excited to finally be able to share the KRONOS with the world
Climb safely and in good style.
Cheers,
Ben
DRY ICE Tools, by Furnace Industries
Ben Carlson
Ben@Furnace-Industries.com www.DRYICETools.com
917.584.1536
Follow us on
Facebook: DRYICETools
Twitter: @DRYICETools
Instagram: furnaceindustries
Specks
Weight: 1 lb 7.8 oz (675 g) Size: One Size Dimensions: Length – 48.26 cm Material: Densified Beech Laminate / Hardened Tool Steel Other Features:
– Axe comes with a hand finished removable type B Furnace Industries Ice pick
– Type T Pick available (sold separately)
– A softer swing as the wood absorbs shock of the pick strike offering increased sensitivity at all temperatures
– Wood handle offers enhanced grip and thermal insulation
– Hand finished handle offers multiple grip options
– The Kronos ice tool has a type T shaft
https://www.neice.com/wp-content/uploads/2015/11/Kronos-2.jpg427640NEice Adminhttps://www.neice.com/wp-content/uploads/2016/10/2012_NEice_logo_oval_blk6-300x103.pngNEice Admin2015-11-18 14:52:352015-11-18 14:52:35The KRONOS is HERE!
The MV (marine vessel) Leif Ericson crunches through sea ice in the Cabot Strait. The ship’s hull groans and 2-3 meter thick ice buckles underneath. Cracks in the ice expose the intimidating midnight blue waters of the North Atlantic. I see the long low hills of the Cape Breton Highlands off to my right, signaling our arrival in Nova Scotia and the end of my stay in Newfoundland. Leaving this place is always bittersweet. Winter trips in hideously cold weather make me long for home; to share a warm space on my couch or bed with my partner and dog. Newfoundland’s landscape and it’s people captivate me though and it saddens me to leave. I am deeply satisfied yet physically spent and tired of the cold.
How does one measure the success of a climbing trip? Is it by how hard one climbed, or by whether one sent their project? Is it by the number of days climbed, areas visited, or routes completed? Can you measure success with first ascents? How about by the number of friends made or visited along the way?
It’s hard for me to say exactly what made this trip to Newfoundland successful. Alden Pellett, Christopher Beauchamp and I got along great and laughed often, and that counts for a lot on any extended trip. Deep in the Newfoundland backcountry we climbed several really long ice lines – some as long as 1800′. Several of the lines we climbed were probably first ascents and check in at WI5+ or WI6. We climbed classic ice lines established by the Joe’s – Joe Terravecchia and Joe Josephson – on a wall that’s as classic as any 3 pitch wall in North America. We made new friends and reconnected with old ones. Newfoundland is famous for having gracious and hospitable people, and my expectations are continuously surpassed.
Over the years many people have climbed ice in western Newfoundland (pronounced newfin-LAND, with the accent on “land”). Paul Fenton, an outfitter in Nain, Labrador, climbed in many of the fjords, and Jim Bridwell spent some time there in the 90’s with him. In the late 90’s Joe Terravecchia and Casey Shaw began climbing there. They have explored the area heavily over the last 20 years, and have brought many other northeasterners along during that time.
It was one of Joe’s slideshows at the Adirondack Mountainfest that finally encouraged Alden Pellett and me to visit for the first time back in 2008. Initially, Joe and Casey were deliberately vague about where and what they’d climbed. This peeved me. I didn’t understand why anyone would be so secretive about the locations of climbs. Did they care so much about first ascents that they were unwilling to share information? Maybe, but I don’t think so. After five trips to the island, and visits to many of the fjords, I realize the brilliance of their decision to keep quiet. It takes two days to get to Newfoundland during good weather. The wind and blowing snow is hideous. The climbs are all in the backcountry. There are no other climbers, no guidebooks, no bolts, and no chance of a timely rescue if something goes wrong. Ice climbing in Newfoundland is about adventure.
I know I’ll be back again. Maybe not next winter because I’ll be in nursing school. After that for sure though. Like those that have come before me, my vagueness about climbing in Newfoundland is deliberate. I want to preserve the experiences I’ve had and cherish so that others can be as fortunate as I have been.
Many thanks to Terry Hynes, Bevin Goosney, Brad and Lamont Thornhill, Clayton, Rick Endicott, and Walt Nichol for showing us true Newfoundland hospitality. Thank you Casey Shaw and Joe Terravecchia for showing me the Newfoundland way. Thank you Michael and Alexa for letting us crash in North Conway before and after our trip and to Rob and Amy for letting us store a car in North Conway. All of these individuals helped make this year’s trip a great success.
Ryan climbing some exposed ice during the trip – Alden Pellett
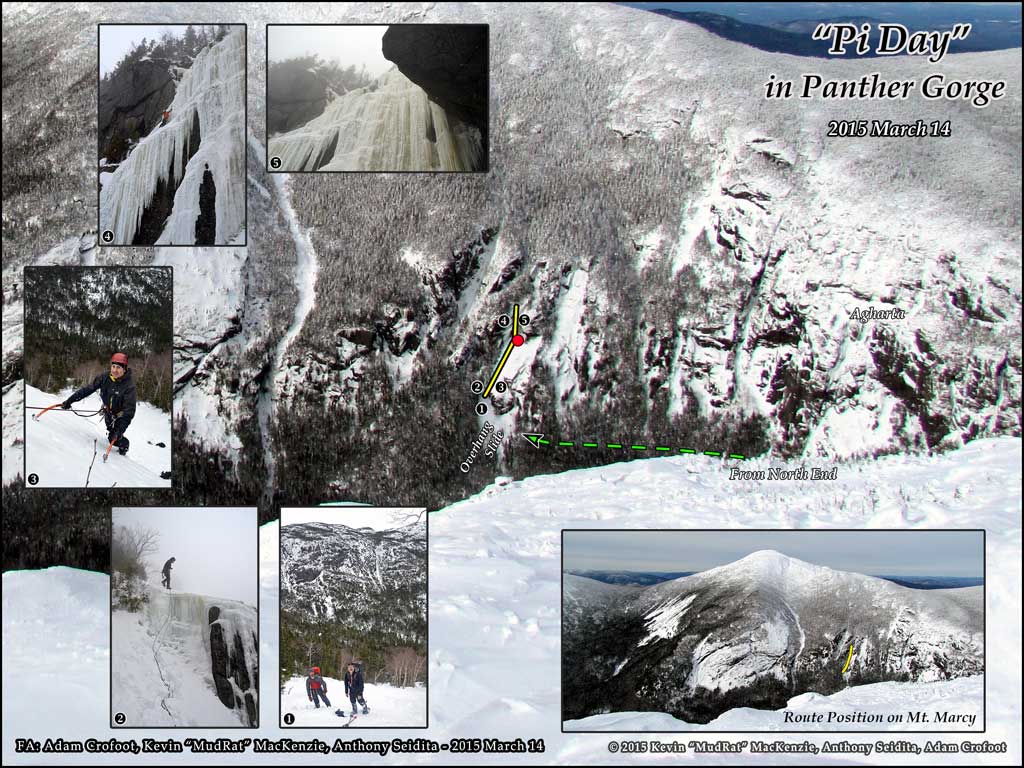
Adam Crofoot leading pitch 2 of “Pi Day” – Photo by Anthony Seidita.
The cold winter of 2015 seemed to last forever. Perhaps it was the weather, perhaps the weather in combination with the pressures of life. In any case, our plans came to life as the sub-zero spell finally broke. Our thoughts centered on putting up (creating) a new ice climbing route in Panther Gorge. I watched the weather as March 14th approached. The forecast called for temperatures in the 30’s Fahrenheit at our target elevation with a possibility of rain. Waiting for a different weather window was pushing the limits of ice season in the gorge, however.
I nearly threw the alarm across the room when it beeped at 3:55 a.m. I love alpine starts, but also needed the sleep—c’est la vie. As usual I spent a restless night pondering the uncertainties of the venture—would the snowpack be at least mildly supportive, could we dial in our approach, would the annoying ache above my left knee subside, would the rain be a problem, would the ice be safe…? We’d prepared as much as we could. The rest was in the hands of God and the weather.
I met Anthony and Adam at the Loj where we divided the climbing gear to distribute weight; our packs were each around 45 pounds between two ropes, protection and the normal winter necessities. Given the trail conditions we chose to carry microspikes, snowshoes and crampons; another three traction device day to add additional weight.
We began walking at 5:00 a.m. on rock hard trails. Fast forward to the bushwhack at 8:30 a.m. We left the Van Hoevenberg Trail high on Mt. Marcy after hiking almost 7 miles. If all went well, we’d thread our way through the cliffs and into the gorge. I can’t stress how dangerous this CAN be if you aren’t intimately familiar with the details of the gorge. It’s not the place to embark on a blind bushwhack—the last thing one wants is to descend 700 feet (especially in unbroken snow) only to find themselves 400 feet above the floor of the gorge.
I took the first step off-trail and punched through a light crust to my shin. Spruce traps were thankfully infrequent. The terrain got steeper as we descended from the ridge and found a gully. There are many gullies in the area each with their own outlet; usually onto the technical climbing walls. Even high on the ridge there were obstacles, smaller ledges draped in ice. Adam eventually took point as Anthony and I checked the heading at regular intervals.
We soon found our jump-off into the gorge—ropes wouldn’t be necessary in these conditions.
A ridiculously steep gully led ever downward. Unsupportive sugar snow under a surface of crust made the descent a challenge. By now we were wearing crampons and they served us well. On a side note, Pi = 3.141592653… We were struggling down the gully at 9:26 a.m.—and 53 seconds on 3/14/15. Ok, I’m done channeling my inner geek.
“We ate lunch and contemplated our exit; it would be grueling”
We passed beside a wall that got ever taller as we descended into the heart of the gorge. The lines here were not covered in ice so we continued lower. Walking became easier as we reached some avalanche runout. It was like walking on blocks of concrete. We changed direction after climbing around a buttress and headed north to what I call the Overhang Slide. This is a relatively short slide with two large overhangs, one at the bottom and one near the top. I thought back to when Anthony and I enjoyed lunch on it last June. Adam and I climbed a portion of this during our last visit on December 7, 2014. I find it to be a place of particularly magnificent views.
Note: This is probably best accessed from the northern pass by continuing 800 feet southwest of the Agharta ice route.
We descended to the glade near the lower overhang and stared up at the wall of ice near the top, an enticing climb. We’d found our climb. I relaxed and scanned the gorge. The view north was largely occluded by trees, but Haystack loomed high and mighty across the way as small wispy clouds drifted across its summit. The beaver ponds to the south contrasted against the dark forest. I thought of the many people over the years who have gotten lost on Mt. Marcy and wandered into the gorge only to need rescue or, in the worst case, recovery. This is both a beautiful and unforgiving area.
Climbing
Adam began the route with a short vertical ledge preceding the low-angle slab. A couple hundred feet higher, he set up a belay from a tree near the upper overhang. Anthony and I climbed the snow/ice at the same time, each on our own rope. It felt odd being on a rope since this is the type of terrain that I normally solo.
We surveyed the scene from the anchor near the upper overhang. The ice was beginning to rot so the purely vertical pitch was out, but there were several other options. The cloud ceiling was in the process of lowering, Haystack had disappeared. The cliffs to the north, however, were still in view. The great ice route of Agharta was in shambles with only the top intact. The slabs were free of winter and wet with runoff.
The fog up-drafted as Adam climbed the left-hand side of the icy wall. It was tedious work as he chipped through the rotten ice to place the screws into more substantial ice. It was an appealing line that included some short vertical sections and a couple small ramps. He led it to the top left-hand corner of the wall. By now the gorge was socked in and a light sleet had transitioned to rain. Thank God for protective layers.
Adam belayed me as I climbed. From the top, the view was obscured yet awesome. Anthony climbed next. I listened to the wind and the sound of ice falling as he chipped his way up—this is what I consider serenity. The rappel down to our packs at the lower overhang went without incident. Our route, “Pi Day”, was completed by around 1:30 p.m., but the day was far from over. We ate lunch and contemplated our exit; it would be grueling.
Exit
By the time we reached the bottom of the gully again, I was thankful for the avalanche debris—finally something stable underfoot before the crux of the exit. The next 300 feet of ascent over 450 ground feet was heinous and spent on all fours digging for traction. Adam was in the front climbing like a phantom in the fog. An occasional chunk of crust bounced off my helmet so I knew he was moving. In the meantime, Anthony was reorganizing his pack below. I began to ascend and watched Anthony slowly dematerialize in the mist. Adam used snowshoes, Anthony and I used crampons. I’m not sure which was better, but the ordeal seemed endless. Yup, this is what we call fun, but nothing good is easy!
The following 600 feet of elevation gain involved no navigational skills, just retracing our steps and overcoming the occasional ledge of unsupportive snow. It’s amazing how much energy one can expend moving 6 feet. Cresting Marcy’s ridge was like arriving at the promised land. Conditions were windy and the high level clouds were thickening. We reached the Phelps trail intersection at around 3:30 p.m. and changed gear. Adam switched to skis which made his descent fun and relaxing by comparison. We arrived back at the Loj at 5:30 after about 12.5 hours of adventuring over 14.75 miles/4,400 vertical feet. Thus ended another wonderful day in Panther Gorge.
A good day is the culmination of good planning and great partners; thanks again to both of you!
DMM is not well known in the US. When you think of ice tools, you think Petzl, Black Diamond , Grivel and most recently Cassin, not DMM. Well once you have a look at these tools, you will start thinking about DMM.
In mid February, DMM gave NEice some of their newest ice tools to review. Since then we have tested them at Lake Willoughby, Cannon Cliff, Crawford Notch and Frankenstein cliff. We have climbed ice from 3+ to 5+ in temperatures ranging from -5 to 45 degrees F. In all, we logged over 100 hours of climbing with these tools and they are fantastic!
The first thing you will notice about the tools is the quality. The manufacturing of these tools is some of the best I have seen. DMM has been around since 1981 and it shows in the construction and design of these fine tools.
Apex: After a few swings, the Apex felt like they had been mine for years. – Chris Thomas
Switch: In my 35 years of ice climbing, the Switch is the best ice tool I have ever used! – Doug Millen
The Apex ($239)
I was lucky enough to demo pair of DMM Apex tools (thanks NEice.com). From the first time I held them I could tell that they were my next gear purchase. I’m not going to spend time on specifications, that’s what Google is for, I’m not technical enough to know why they matter. What I do know is these tools are perfect for the climbing I do and affordable enough that I’ll have new tools and enough left over to pay the tolls between me and the ice.
The first climb on the DMMs was a moderately steep pitch of 4 ice. A few swings of the Apex and I felt like they had been mine for years. The grip fit my hand well and the tool felt balanced, a little less top heavy than the Cobra. Although the shaft is straighter clearance between my hand and the ice was more than enough. The Apex felt more like the Petzl Quark then the Cobra having a different pull which you could feel in the angel of the wrist.
Bottom line… If you’ve been climbing on Vipers, Cobras. Quarks. etc. and dreaming about a more technical tool that climbs and canes even better, the DMM Apex is your next set of tools. When you consider price and performance of this tool there is no better for the majority of mere human climbers.
I have used Nomics for years and I was curious about these tools.
They are slightly heavier than the Nomic but the extra weight feels good and requires less swings in hard ice. The Pick weights are included but I found I did not need them. At about 1 inch longer than the Nomic it was easier to reach for better holds. The tool is fully T rated and you will not be able to break any part of this sturdy tool. The hand grips of the Nomic feel fragile and weak in comparison to the Switch. The handle is glove friendly, hot forged ergonomic with full strength upper and lower rests. If you use different gloves in different conditions you will like this grip and big hands fit well. The coating on the handle is great, I never felt like I was slipping out, even on overhanging ice. The swing of the tool is perfect too and so natural. I am a carpenter and I know a good swinging tool when I feel it. The picks come with the perfect shape for ice or mixed climbing and are pre-tuned. I never touched the picks with a file. The Picks go right in, and come right out, no problem, yet they feel really sticky and secure in the ice. The Switch as it’s name implies remains in balance when switching hands on the rests.
The only concern of mine is how the coating on the handle will hold up over time. So far, so good, not even a nick.
Bottom Line…I have switched from Nomics to the Switch, and I have loved every moment of the last 6 weeks climbing with this tool. The Switch is now my tool of choice.
Features
Glove friendly, hot forged ergonomic handle with full strength upper and lower rests and supreme stability
T Rated Integrity Construction
Full strength clip-in point accessible from either rest
High clearance shaft
Inboard eyelet allows threading of cord for use with freedom leashes
Pick weights for bullet hard ice and customized balance
Supplied with grip tape for handle/shaft customization
Supplied with T Rated Ice picks as standard
Mixed and Ice specific picks available separately. Compact Hammer, Compact Adze, Mountain Adze (Large)
Though everything in the backcountry is alluring, a few places and features intrigue me more than others. Most of the upper Great Range holds a special place in my heart. While climbing Gothics via Pyramid in the early 2000’s I was taken by a stone sculpture, a cliff, on the far side of the cirque. The four tiers of the cliff were striped with moss, lichen, water and algae. I snapped several photos and looked at them every now and again. I thought it unfathomable to observe it more closely, however—go off-trail—heck no!
That changed in 2011 when I climbed a portion of the East Face/Rainbow Slide for the first time. The lowest slab, perhaps 25-30 degrees in slope provided the perfect vantage point to study the feature. Being so close was humbling and I felt small and insignificant.
A view of them in 2012 again captured my attention during a winter ascent of the Rainbow Slide with Anthony Seidita. This time they were partially covered with a continuous, but delicate looking line of ice. It never crossed my mind that they could be climbed—ice climbing was something that my cousin Ed Tuttle mastered, but one that I feared at the time. Over the summer of 2014, I studied the ice line repeatedly. A note began to resonate until it became a constant hum in the back of my mind. I thought, “What if…?” The thought turned into a dream that unfolded on March 7, 2015.
I re-considered the recommended approach over Pyramid to the Pyramid/Gothics col. It served me well in the past with a supportive snowpack, but I couldn’t bear the thought of climbing Pyramid with a 45 pound winter climbing pack with rope, axes, protection etc. then descending-climbing-and re-climbing the cirque. I also knew that Cascade Brook hosted considerable storm damage. Thus I studied the terrain and plotted a direct line from 3,200 feet in elevation. The line left the Weld Trail just after the last stream crossing (about 10 feet wide) before the steep climb up to the Pyramid/Sawteeth col.
A heading of 345 degrees magnetic led up a gentle slope to the crest of Pyramid’s east ridge before moderately ascending to the bottom of the East Face. In all the bushwhack ascended a mere 400 vertical feet over ½ mile as opposed to the 1,200 foot gain to Pyramid. The refined approach would save about a mile in distance and 1,000 feet of elevation gain—or tank the day… To me, an adventure is all about exploring and trying new things—this seemed a worthy addition to a day with many variables.
Partner Matt Dobbs picked me up at 6:00 a.m. Our trek began at 6:45 a.m. from the AMR trailhead. Our pace was steady yet comfortable on a well-packed trail and, at 9:20 a.m., we began the bushwhack along the proposed approach.
Switching leads every 100 paces or so kept us fresh though it was a relief to finally reach more level ground atop the ridge. As a bonus, we could see our climb on opposing side of Gothics’ cirque through the trees—my heart quickened. I found myself enjoying the exertion as a way to burn off a growing anxiety about what we’d find at the route. Gentle side sloping defined the rest of the trek.
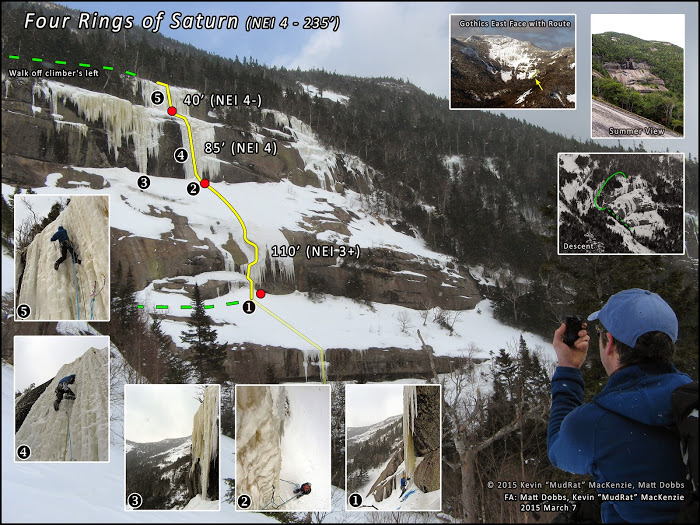
Gothics’ East Face and the New Route
We walked onto the lower slab of the East Face after only an hour and one-half’s bushwhack feeling refreshed and inspired. The semi supportive crust on the face was a change from the ice I’d found in previous years. Gothics’ summit loomed far overhead as snow flurries drifted across a pastel blue sky. I looked north across the face at our proposed line. I felt a pang of fear rise and wondered what I’d gotten myself this time.
The upper tier looked ok; the bottom was thin and delaminating. A snowfield led to another smear of ice with a dubious looking curtain touching at the bottom. What was on the snowfield; was it snow over ice or would it be powder over smooth rock? The question concerned us both. The third step sported a thick looking curtain of ice on an overhanging cliff. It touched down on the snow/ice slope below. We studied the lines and approached.
Tier 1: I scooted up the snow slope and crept under the roof. Matt noted that it looked like an amazing bivy site; it was a very cool area. I tucked myself behind a meager patch of ice attached from above. I touched the back of it lightly with a foot and it detached with a crash. With good ice this would add another 10 vertical feet of ice and about 75 feet to the length of the route, but not this day.
Tier 2: We climbed the snow slope on the left, stomped some platforms for the packs and changed gear. We traversed out to assess the thin ice column touching the base and contemplated what was above. There are enough cracks at the base that some cams up to about 2” would have been nice, but I set up a belay anchor from a nearby tree.
The first 10 feet was vertical and good, if not a bit delicate. Another question was whether the smear would be thick enough for screws. Matt climbed up and disappeared placing several ice screws along the way. Meanwhile, the snowfall got heavier and began to obscure the Ausable Valley. I could no longer hear Matt, only the sounds of the breeze and occasional pieces of ice falling from above. I felt the remoteness of the setting deep in my soul. This is what I sought—peace and solitude.
Matt eventually yelled, “Anchored!” His voice sounded like it was coming far away from Pyramid, but it was merely echoing off the cliffs. I began the climb and realized this was the real deal—a notch far above my beloved slide climbing and harder than anything I’d previously attempted—not the normal place to test limits. Ten feet of vertical ice led to a slight decline; my left foot hit the ice. It answered with a loud hollow thud. Safer ice was on the right side.
The snow slope was a welcome respite and firm under foot. It was icy underneath—exactly what we wanted. I climbed to Matt who was anchored from the curtain on the third tier. It was far thicker (around 2 feet) than I thought. Since the cliff was overhanging, there were several feet of space between the back of the ice and the anorthosite. To the south were various hanging pillars, some broken off; in the background was Pyramid. The slope on the right led to the woods and more cliffs. The slope below dropped off into the void. It was sublime regardless of the fear compartmentalized deep inside. Being new to technical ice climbing, I was working outside my comfort zone. I leaned back in my harness and thought, “This moment will last forever in my memories.”
Tier 3: This was the crux ; a sustained wall of vertical ice some 50 feet tall. The curtain was rock hard and safe (I can hear some of you laughing at the oxymoron). Matt led it and disappeared above. The first 10 feet overhung slightly and made the vertical section seem comparatively comfortable to climb. By the time I’d removed the screws and climbed 40 or so feet, my arms were tired.
Tier 4: The final 20 foot pitch passed quickly and I found Matt anchored in a grove of spruce. The route was done, but the trip was far from over.
Exit: A short bushwhack through waist deep snow led to a cliff band and gully. We easily down-climbed while hoping the huge daggers of ice above would stay attached while we passed below. The gully was icy underneath the snow, but easy to downclimb. The cliff offered another good if not longer and harder climb for a future year. This too was an inspirational area, one that merits a future trip. Another climb down a gully to the left led to the base of our route. The time stood at 4:20 p.m.
Our exit was already broken out—we simply retraced the approach. Our footsteps had hardened and most of the walk was downhill. Thus we made it back to the Weld Trail in 45 minutes. It was hard to shake the excitement I felt from exploring another area of Gothics, an area that I’d never seen nor dreamed of climbing. The Adirondacks has so many untouched jewels to offer if you know where to look…
Route: 13 miles/~3,600 feet elevation gain. St. Huberts – Ausable Lakes via Lake Road – Alfred W. Weld Trail – 3,200 Feet elevation – bushwhack 1/2 mile at heading of 345 magnetic to East Face – Climb route – Exit along same route.
https://www.neice.com/wp-content/uploads/2015/03/four-rings-of-saturn_mosaic_mudrat_dobbs_FA-480x3601.jpg360480NEice Adminhttps://www.neice.com/wp-content/uploads/2016/10/2012_NEice_logo_oval_blk6-300x103.pngNEice Admin2015-03-16 11:45:372017-11-28 16:45:46Four Rings of Saturn
Ice climbing, mixed climbing, and mountaineering clinics with IMCS & Guest Guides (room still available!)
Climbing demos from 12+ sponsors
Morning coffee sponsored by Frontside Grind at the American Alpine Club Table
Beer sponsor, Tuckerman Brewing Company
FOOD! Gusto’s Food Truck will be at IME during Apres and at the evening events
Evening events held at Theater In The Wood, Intervale, NH
Friday Evening Events, 7pm, $10, at Theater In The Wood, Intervale, NH
Featured Presenter: Sarah Hueniken
American Alpine Club Silent Auction to benefit the Live Your Dream Grant
Saturday Evening Events, 7pm, $10, at Theater In The Wood, Intervale, NH
15 Minute Opener: Miron Chlebosz
Featured Presenter: Jonathan Griffith
NEice and The Soup Kitchen Return with delicious homemade soup during the Apres Climbing Hour at IME Friday & Saturday, 3:30-5:30. NEice has been bringing hot soup to ice climbers for over a decade and contributes to all the major Ice Festivals in the Northeast. The soup is alway a hit after a day out in the cold! Doug will also have his latest drones and some awesome footage from the UP project.
https://www.neice.com/wp-content/uploads/2015/02/2015_IceFest_web-banner2_zps02c91a091.jpg160600NEice Adminhttps://www.neice.com/wp-content/uploads/2016/10/2012_NEice_logo_oval_blk6-300x103.pngNEice Admin2015-02-03 11:52:072017-10-04 14:14:32Mount Washington Valley Ice Fest 2015
This year again they will have multiple clinics on all the skills and techniques you need to get out on ice – from basic skills, to dry-tooling, to glacier travel techniques.
Demo ice climbing gear from Black Diamond, Petzl, La Sportiva, Outdoor Research and Rab.
Slide show will be held Saturday at Rock and Snow at 8pm.
Saturday Slideshow:
NEice’s Doug Millen – Oh What a Long Strange Trip it’s Been!
Doug Millen reflects on the last 15 years at the helm of of NEice.com. Doug takes us on a journey of the ups, downs and glory days of NEice “A journey beyond my wildest dreams”. The Best of the Best from NEice.com. Including never seen photos and video from the Northeast. And a look at the UP project. Drones are fast becoming common place and Doug is on the leading edge. Have a look at his latest machines and where he is headed.
The demo gear will be located at Rock and Snow – so you can try out the latest Harnesses, Ice Tools, Crampons, and clothing from the best companies. You know them – Black Diamond, Petzl, La Sportiva, Outdoor Research & Rab.
Rates are $150 per person per event – Slideshows are free!
As an added bonus – Rock and Snow will offer 15% off for ice gear and apparel for all icefest registrants from the time they sign up through the end of the ice fest. All you need is to print out and show them the confirmation email we send when you register for it.
NEice will be at the Devils Kitchen on Saturday handing out hot soup and flying the drones. Hope to see you there!

 I found out that evening, when my phone buzzed with picture messages, that I was dead wrong. While I was in and over the clouds that day, there was a duo climbing what was likely the longest and fattest ice line in northeast as of that moment. That was Hillman’s Highway in Tuckerman Ravine, and yes, there was a lot of ice. At least the beautiful undercast was worth missing out on the climbing action.
I found out that evening, when my phone buzzed with picture messages, that I was dead wrong. While I was in and over the clouds that day, there was a duo climbing what was likely the longest and fattest ice line in northeast as of that moment. That was Hillman’s Highway in Tuckerman Ravine, and yes, there was a lot of ice. At least the beautiful undercast was worth missing out on the climbing action.